Карвинговая лыжа 2.
Сбытие мечт.
Игорь Изыльметьев
Enthusiasm never stops
/head.com/
Такое «кинематографическое» название по тонкому замыслу автора должно отражать
то,
- что данная статья является развитием опубликованной ранее статьи Карвинговая Лыжа. В поисках идеала., где автор, опираясь, впрочем, не только на свое мнение, высказал кое-какие соображения о нынешней карвинговой лыже и «чистом» резаном повороте, и позволил себе немного помечтать о том счастливом времени, когда эра управляемых материалов придет и в лыжестроение;
- что, пока он мечтал, эра не заставила себя ждать и пришла в виде лыж Head Cyber i.C 300 Chip System, где эти самые материалы были уже с успехом использованы. Поскольку автор в упомянутой статье обещал вернуться к вопросу об «идеальной» лыже, как только это событие произойдет, то ему ничего не остается, как выполнять взятые обязательства.
Поскольку и в этой статье слово «идеальность» будет мелькать довольно часто, то следует пояснить, что автор под ней подразумевает. Среди множества аспектов «идеальности» карвинговой лыжи мы будем рассматривать только те ее характеристики, которые определяют способность лыжи выполнять резаный поворот, то есть то, для чего она, собственно, и предназначена. К таким характеристикам можно отнести геометрию лыжи и ее механические параметры, такие как жесткость на изгиб и кручение. Проще говоря, «идеальная» лыжа та, которая способна выполнять «идеальные» же резаные повороты. В предыдущей статье автор писал, что скользящая поверхность лыжи в таком повороте должна принимать форму поверхности прямого кругового усеченного конуса.
В чем же состоят наши претензии к карвинговой лыже традиционной конструкции, - а теперь уже можно сказать и так! - т.е. построенной целиком на сопротивлении материалов? По сути, их две.
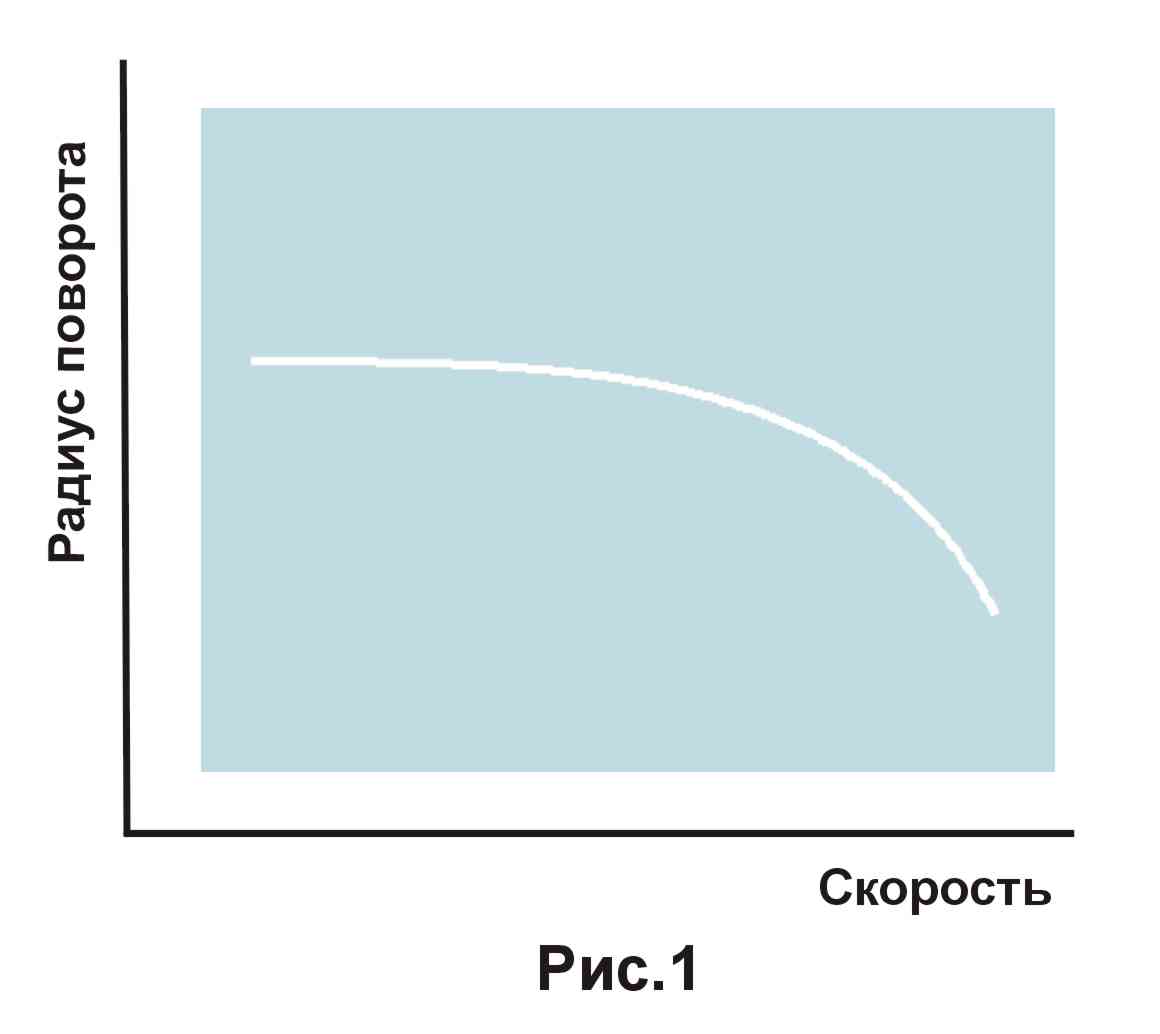
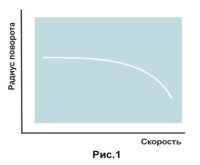
1. Такая лыжа образует требуемую геометрическую форму за счет прогиба и скручивания при ее закантовке и нагружении. Величина прогиба определяется формой бокового выреза и углом закантовки лыжи. Соответственно и радиус поворота конкретной лыжи однозначно определяется углом закантовки. И скорость поворота, им соответствующая, однозначно определяется также. То есть, скорость эта одна и единственная. Проиллюстрировать это, пожалуй, наглядней следующим образом. Представим себе карвинговую лыжу, «идеально» спроектированную для совершенно определенного состояния снега и так же изготовленную, т.е. такую, которая при любых рабочих углах закантовки принимает «идеальную» же форму. Тогда, если на рис.1 голубая область соответствует множеству сочетаний скоростей и радиусов поворотов, при которых мы хотим или можем поворачивать на этой конкретной лыже и на этом конкретном снегу, то «идеальной» эта лыжа будет только для точек, лежащих на белой линии, которая определяется геометрией лыжи. Для остальных «голубых» точек этой области данная конкретная лыжа не может быть «идеальной» принципиально. Для лыж с бо�льшим радиусом подобная линия будет проходить выше, для лыж с меньшим радиусом – ниже. Но как же лыжнику изловчиться «попасть» на эту линию, чтобы совершить «идеальный» поворот? А никак. Он не знает ни скорости, ни радиуса поворота. Он может руководствоваться только личными ощущениями, полученными в результате лыжной практики. То есть примерно ощущать скорость, радиус поворота, состояние снега и те ощущения от ведения лыжи, которые возникали раньше при схожих условиях. А ощущения - вещь субъективная. Каждый, к примеру, знает, что такое поворот с проскальзыванием на уровне ощущений. Но давайте взглянем на два гипотетических следа от лыж на снегу.
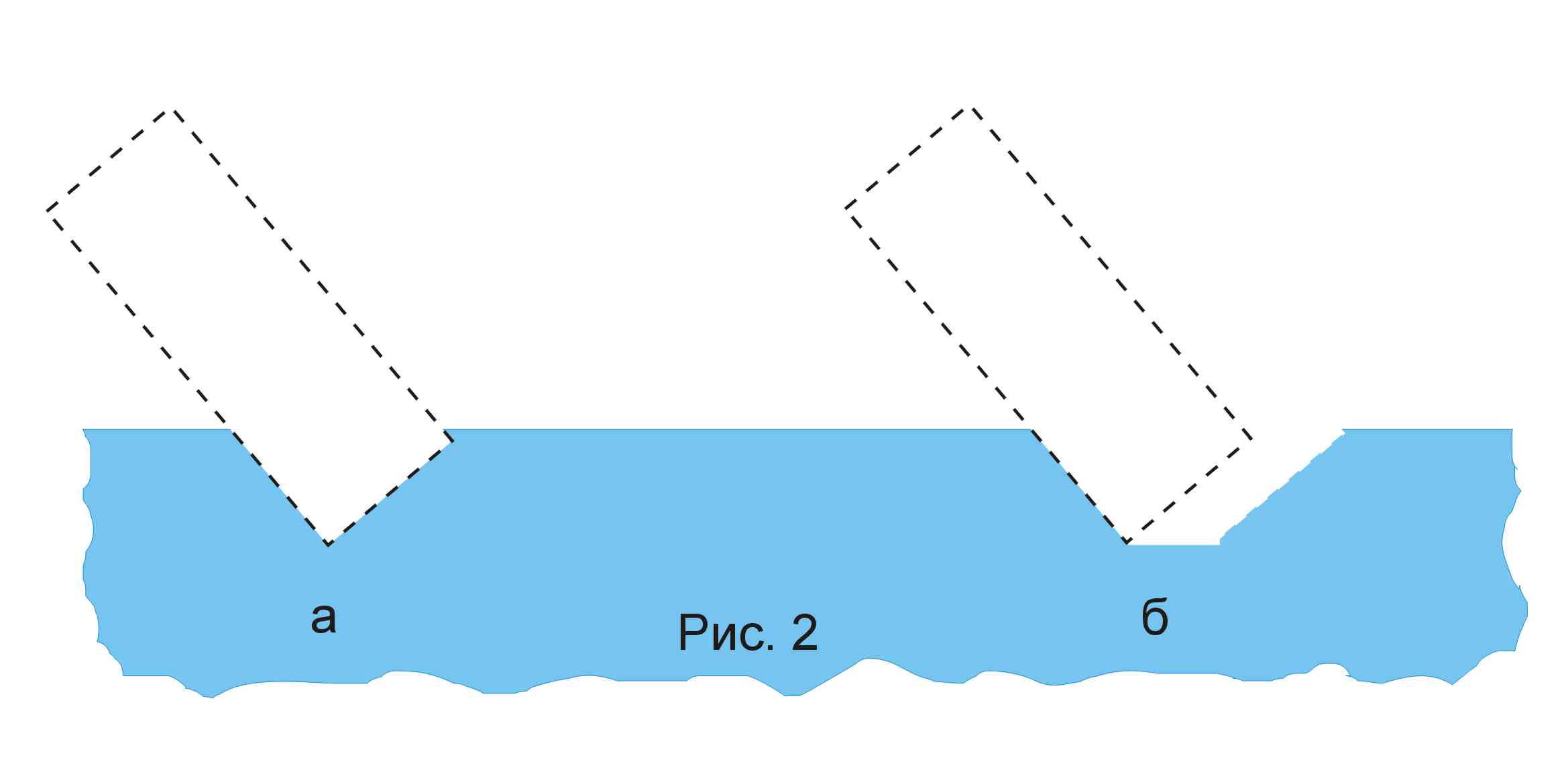
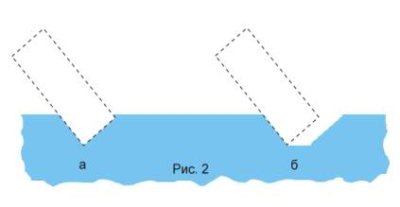 На рис.2 примерно изображены два сечения следа от лыж в резаном повороте. Левое (а), где след образуется только поперечным сечением лыжи, соответствует, в нашем понимании, «идеальному» резаному повороту. В правом сечении (б), след «размазан» на несколько миллиметров, за счет, как раз, несоответствия лыжи требуемой форме (если «идеальный» след всего один, то разновидностей «неидеальности» множество, но все они будут выливаться в увеличение площади сечения следа). Скажем, лыжа при ведении изгибается в дугу, но это не дуга окружности. Вопрос состоит в том, может ли лыжник уловить разницу в ощущениях в том и другом случае. По мнению автора - вряд ли. И в том и другом случае он ощущает твердую опору на кант, поскольку проскальзывания, как такового, нет или оно минимально. Но разница, безусловно, есть, как понимает читатель, и она в разной величине сопротивления движению лыжи. Мы еще затронем этот вопрос позже. А пока можно сказать, что «идеальный» резаный поворот, даже в этих идеальных условиях, есть скорее исключение, чем правило. То есть, в подавляющем большинстве случаев мы имеем вариант «б». И способов улучшить положение дел в рамках традиционной конструкции лыжи не существует. Не может же считаться выходом формирование, к примеру, «многорадиусного» бокового выреза, когда передняя часть лыжи «заточена» под один радиус поворота, а задняя - под другой, а в середине – что-то среднее. Такая лыжа никогда не будет работать как единое целое.
2. Каждая модель карвинговых лыж проектируется в расчете на определенную целевую группу лыжников и определенные условия катания. Лыжа, рассчитанная на мягкий укатанный склон, никогда не будет хорошо работать на льду и наоборот. Возникла узкая специализация лыж по кондициям снега и уровню/стилю катания лыжника. Она, конечно, выгодна для производителей лыж, но, с точки зрения лыжника, необходимость иметь и возить с собой в горы несколько пар лыж вряд ли можно признать «хорошим решением». Но преодолеть такое положение вещей путем конструктивных изменений также не представляется возможным, поскольку механические характеристики лыжи «зашиваются» в ней раз и навсегда.
Из всего сказанного следует, что, для того чтобы карвинговая лыжа более ли менее походила на «идеальную», необходимо изменять ее свойства в соответствии с условиями, в которых лыже приходится «трудиться». Поэтому автор и писал в предыдущей статье о материалах, которые позволяют это делать. Например, пьезоэлектрики. На их основе и выполнены управляющие элементы в лыжах Head, о которых речь шла выше. Head называет их «intellifibers». Класс подобных материалов не исчерпывается пьезоэлектриками, и, чтобы не употреблять всякие сложные слова, мы далее будем называть их «управляемыми материалами» (УМ), подразумевая под этим материалы, способные изменять свою форму и/или линейные размеры под действием управляющих электрических сигналов. Материалы такого рода обладают и обратным эффектом (вообще-то, именно он и называется прямым), т.е. способностью вырабатывать электрическую энергию при их механической деформации, но для управления характеристиками лыжи это не существенно. Зато существенно, когда встает вопрос - где брать энергию для такого управления? Ее тоже приходится получать и накапливать, используя УМ (правила FIS запрещают использование в лыже каких-либо внешних или встраиваемых источников питания).

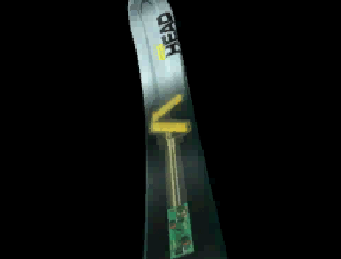
Теперь давайте взглянем на лыжу Head Cyber i.C 300 и постараемся понять, как она работает. На рис.3 видны два желтых силовых элемента, расположенных в виде буквы V, практически под углом 90°. Они изготовлены из этих самых УМ и способны под действием электрического сигнала сжиматься или расширяться в зависимости от его полярности. Поскольку они закреплены на силовом кожухе лыжи, то создаваемые ими усилия передаются непосредственно на лыжу. Почему они размещены именно здесь и именно так? Здесь – потому, что в этом месте жесткость лыжи на кручение наименьшая, а скручивающие моменты самые значительные. Носковая часть лыжи шире пяточной и длиннее, если считать от креплений. Поэтому она скручивается сильнее. А так они размещены потому, что при скручивании носка лыжи один из них будет растягиваться, а другой сжиматься, в зависимости от того, в какую сторону скручивается носок. А раз так, то, заставляя их поступать наоборот, т.е. заставляя сжиматься тот элемент, который растягивается и расширяться тот, который сжимался, можно противодействовать скручивающим моментам, увеличивая тем самым торсионную жесткость лыжи или даже перекрутить ее в обратную сторону, если на это хватит развиваемого этими элементами усилия. Как утверждает Head - хватает. Если же мы заставим оба этих элемента сжиматься или расширяться одновременно, то сможем влиять на прогиб лыжи. Таким образом, мы видим уже существующий элемент управления механическими характеристиками лыжи и, даже, ее формообразования. Пусть пока это единственное место на лыже, где это управление осуществляется. Никто же не мешает конструкторам завтра поставить их несколько или покрыть ими всю лыжу. Как только они технически и технологически будут готовы.
Рассмотрим еще, как работает контроллер в этой лыже, вернее, как он мог бы работать. Поскольку автор не нашел на сайте Head никаких материалов на этот счет, то нижеследующее является его собственными домыслами. Для управления нужны некоторые сигналы, которые соответствовали бы состоянию лыжи, и которые контроллер мог бы обрабатывать и рассчитывать ответные управляющие сигналы. Если в силовых (исполнительных) элементах, расположенных на лыже, часть волокон используется как датчики, то по снимаемым с них сигналам можно определить прогиб лыжи и ее скручивание. Как мы уже говорили, при скручивании лыжи один из силовых элементов сжимается, а другой растягивается. При прогибе лыжи они оба будут сжиматься. Поэтому сумма сигналов, снимаемых с датчиков, соответствует прогибу лыжи, а их разность соответствует ее скручиванию. Имея эти две величины, контроллер соотносит их между собой на основании алгоритмов или табличных данных, зашитых у него в памяти, и вырабатывает сигналы, которые подаются на соответствующие силовые элементы, которые уж и производят необходимые корректирующие действия. Задачей контроллера является, таким образом, поддержание соответствия между прогибом и скручиванием лыжи, т.е., как мы и говорили ранее, поддержание требуемой формы скользящей поверхности лыжи. Разумеется, алгоритм управления сложнее и начинает, вероятно, работать с некоторого порогового значения скручивания, иначе носки лыж начинали бы скручиваться просто при наезде на бугор.

Рассмотрим один и тот же резаный поворот, совершаемый такой лыжей при различных состояниях снега. Положим, что на снегу средней плотности лыжа ведет себя идеально, поскольку и была на него рассчитана. Тогда прогиб и скручивание полностью соответствуют друг другу, и контроллеру вмешиваться не приходится. Но на льду носок лыжи будет скручиваться значительно сильнее, и контроллеру придется добавить противодействующих скручиванию усилий с тем, чтобы привести величины скручивания к требуемому значению. На мягком снегу, наоборот, носок будет скручиваться слабо, и контроллеру придется его дополнительно закрутить, чтобы привести, опять же, в соответствие. Как видим, это прямой ответ на нашу претензию №2, - лыжа становиться значительно более универсальной и уже менее зависит от состояния снега. Стала ли она ближе к лыже «идеальной»? – несомненно.
Но попробуем теперь совершить один и тот же поворот на одном и том же снегу, но при различных скоростях. Может ли такая лыжа адаптироваться к изменению скорости? В определенном смысле – да, поскольку изменение скорости влияет на величину скручивающих сил, и под эти изменения лыже придется приспосабливаться. Но, как только изменяется скорость, лыжа сходит со своей «белой линии» и «чисто» резать уже не может. Так что в смысле претензии №1 мы остались там же, где и были. И по-прежнему вынуждены ездить так, как позволяет лыжа, а не так как нам хочется. Но, если это приемлемо, скажем, для «рекреационного» катания, то на спортивной трассе, где траектория жестко определяется расстановкой ворот, лыжнику приходится прибегать к различным ухищрениям, чтобы сохранить подобие резаного ведения. Что, разумеется, сопровождается потерями. Можно, конечно, сказать, что «таковы суровые законы лыжи». А можно попытаться эту ситуацию исправить.
Думается, автор уже сделал достаточно, чтобы показать читателю необходимость управления не только закручиванием лыжи и ее прогибом, но и геометрией. Да, да, - рано или поздно придется управлять именно геометрией лыжи, если мы хотим получить «идеальный» или «чистый» резаный поворот. Управление геометрией лыжи в данном случае означает управление геометрией бокового выреза, и, как уже, наверное, заметил вдумчивый читатель, в зависимости от скорости, с которой совершается поворот. То есть, лыжа, которая при малых скоростях движения лыжника представляла бы из себя некий «радикальный карв», по мере увеличения скорости должна становиться все менее и менее «радикальной», чтобы соответствовать условиям своего собственного движения. То есть, если точка «радиус-скорость» сошла с «белой линии», то не лыжник должен выкручиваться, а сама «белая линия» лыжи должна переместиться так, чтобы проходить через эту точку, причем автоматически, без участия лыжника. Задачей, таким образом, является превратить белую линию на рис.1 в достаточно широкую белую полосу.
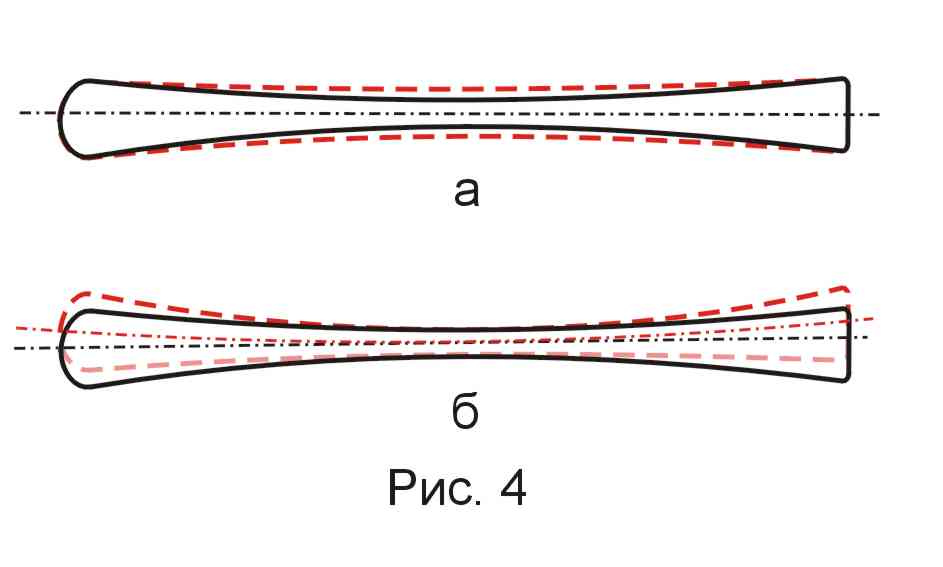
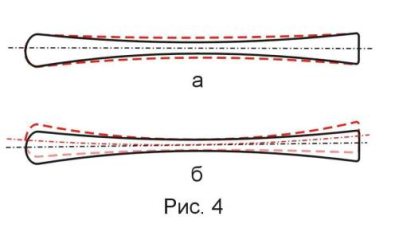 С лыжей не видно большого количества вариантов управления ее геометрией, Либо так, как показано на рис.4 (а), либо так, как на рис.4 (б). Либо лыжа может изменяться симметрично, изменяя радиус поворота сразу с обеих сторон (неважно, сосредоточены ли эти изменения возле талии, или в носке и пятке), либо она изгибается в одну из сторон, с тем, чтобы радиус поворота изменился требуемым образом. Прямо скажем, автору вариант «а» пока представляется в неблизкой перспективе. Вариант «б» выглядит значительно проще и может быть реализован раньше. Ничего, что он означает перегибание лыжи в самом «сильном» месте, т.е. поперек сердечника. Если сердечник изготовить из тех же самых управляемых материалов, то они изогнут все, что угодно, и в нужных соотношениях. Но, с другой стороны, такая лыжа должна будет перестраиваться в каждом повороте, перегибаясь в противоположную сторону, что потребует дополнительных энергетических затрат. Вариант «а» в этом отношении более предпочтителен, поскольку скорость лыжника меняется не столь стремительно. Пусть это пока трудно представить, но если надо, то заставят и лыжу изменять свою геометрию. Как только это произойдет, то вкупе с возможностями управления прогибом лыжи и ее скручиванием, мы будем иметь полный набор средств для управления формой лыжи в повороте, т.е. сможем делать ее такой, как нам необходимо. То есть, не нам, конечно, а производителю. Он будет определять, какой должна быть лыжа в тех или иных условиях.
В «исполнительной» части, таким образом, лыжа должна иметь возможность управления боковым вырезом, изгибной жесткостью и жесткостью на скручивание по всей рабочей длине лыжи. Автор хотел бы только добавить, что это не есть самостоятельные задачи, а есть только составляющие единого процесса формообразования лыжи в повороте.
Понятно, что реализация всего перечисленного потребует коренного изменения конструкции лыжи. И не только в плане обеспечения возможности управления ее формой и механическими характеристиками. Для управления нужна информация о текущих параметрах поворота. Как мы уже говорили, геометрия лыжи должна перестраиваться в соответствии с ее скоростью. А для лыжи «б» на рис.4 потребуется еще и информация о направлении предстоящего поворота, поскольку сама лыжа не знает, в какую сторону ей предстоит изгибаться. В качестве таковой может быть использована, к примеру, информация об изменении углового положения лыжи относительно склона в процессе перекантовки. Или же информация о направлении скручивания лыжи в процессе закантовки. Первая возникает раньше по времени и поэтому предпочтительней, но зато требует каких-либо устройств для ее определения. К тому же, автор слегка схитрил, чтобы упростить себе задачу: то, что мы рассматривали до сих пор, соответствует резаному повороту на горизонтальной плоскости, когда параметры поворота остаются постоянными. Для реального склона мало, чтобы лыжа принимала форму конической поверхности, - для «идеальности» поворота необходимо, чтобы эта поверхность непрерывно изменялась в ходе поворота. Поэтому для полного управления лыжей, помимо скорости, необходимо знать радиус поворота (или угол закантовки, который позволяет его определить), угол падения склона и фазу поворота, т.е. угловое положение лыжи относительно линии ската. Каким же образом можно все это определить? Автору представляются три возможных направления реализации этих требований (со всеми их возможными комбинациями, разумеется).
Разработка автономных измерителей всех этих параметров. Хоть это самая простая и понятная постановка задачи, но, учитывая то, что нужно мерить что-то относительно снега, субстанции весьма неопределенной и непостоянной, перспективы такой разработки автор оценил бы крайне низко.
Использование GPS или ее принципов. Установка на лыжу GPS-приемника и периодическое определение трех координат лыжи в пространстве, позволяет строить траекторию движения лыжи. Зная траекторию, можно, помимо определения скорости, делать некоторые косвенные оценки радиуса поворота, угла падения склона и положения лыжи. При этом совсем не обязательно использовать имеющиеся спутниковые системы. Достаточно на тех же принципах решить задачу в пределах одной горы, установив в нужных местах соответствующие излучатели. Однако, как и в случае с автономными измерителями, есть вероятность, что FIS не понравится лыжа, которая каким-либо образом взаимодействует с окружающей средой, и на нее наложат «табу». Если уже не наложили. От этого недостатка свободен следующий метод.
Счисление движения на основе измерений линейных и угловых ускорений лыжи. Такие системы давно и с успехом используются при управлении движением всяких летающих вещей. Габаритные размеры уже существующих датчиков вполне позволяют вписать их в лыжу без особенных проблем. Основная сложность при таком подходе будет иметь, в основном, алгоритмический характер, поскольку и движение лыжи и условия ее работы кардинально отличаются от «стандартных» применений. Подобная система позволяет получать практически полную информацию о движении лыжи, не заглядывая никуда наружу. Наряду с компонентами скорости можно определять и угловое положение лыжи. А информация лишней не бывает. Например, знание скорости и углового положения лыжи относительно склона позволяет сразу же решить задачу о форме лыжи, поэтому возникает искушение ее сразу и сформировать. Действительно, зачем формировать сначала боковой вырез, а потом ждать, когда лыжник прогнет лыжу, если это можно сделать сразу же, предоставив лыжнику к моменту окончания перекантовки уже полностью сформированную нужным образом лыжу. Ему останется только «воткнуть» ее в снег. Если это будет полезным с какой-либо точки зрения. Или, другой пример: знание компонент вектора скорости лыжи позволяет выявить момент начала проскальзывания, поскольку проскальзывание можно рассматривать как отклонение вектора скорости лыжи от ее продольной оси. Это позволит «замыкать» систему по этому параметру, проводя дополнительную коррекцию характеристик лыжи в том случае, если проскальзывание возникнет.
Но не все можно измерить и определить. Например, состояние снега или его изменение по высоте или времени. Поэтому, возможно, мы увидим и такие способы настройки лыжи на конкретные условия, как изменение программы контроллера. Вроде замены СИМ-карты в телефоне. Захотелось нам, скажем, покататься на такой «высокоинтеллектуальной» лыже по целине, для которой она вовсе не предназначена. Заменим программу на такую, которая «раскатает» лыжу рис. 4 (а) на максимальную ширину и больше ничего не будет делать. И, худо-бедно, сможем ездить и по целине.
Пора и остановиться. Думается, у большинства читателей уже созрел кардинальный вопрос: а надо ли весь этот огород, что тут наплел автор, городить?
А вот что думает автор на этот счет. Нам, то есть любителям катания на лыжах, в принципе, всего хватает. Для fun’а нам достаточно и того, что есть, тем более что, чем ближе лыжа будет приближаться к «идеальной», тем менее мы будем это чувствовать. Нам бы как можно более «универсализовать» лыжу, чтобы одна модель нас бы удовлетворяла на большинство случаев жизни и, хотя бы, не на один год. И в эту сторону, как мы видели, сдвиги есть.
Но в профессиональном спорте существенно другая ситуация. Там не до ощущений. Взглянем снова на рис.2. След «б» сравнительно со следом «а» имеет «производственные» потери - дополнительный слой снега, который лыже приходится срезать /раздвигать/перемещать, что выливается в дополнительное сопротивление. По очень осторожным оценкам величина этого сопротивления может составлять от десятков до сотен грамм и более. Нетрудно прикинуть, что на трассе, скажем, специального слалома дополнительные 100 грамм (автор имеет в виду исключительно силу сопротивления), которые действуют только в половине поворотов, приведут к дополнительной потере времени на уровне 0,3 – 0.5 сек. Каждый, кто интересовался этим видом, соображает на сколько мест это может тянуть в финишном протоколе. Учитывая большие интересы и не менее большие деньги, которые крутятся в скоростных, или спортивных, видах, можно смело сказать, что лыжа, которая «имеет в запасе» 0.1-0.2 сек., всегда будет востребована.
Вот такой небольшой прогноз развития карвинговой лыжи автор, не озабачиваясь особо вопросами реализации, и имел честь изложить читателю. То, что невозможно сделать сегодня, будет возможно завтра. Что-то автор не учел, чего-то недосмотрел. Много интересных вопросов осталось «за кадром». Много еще возникнет в процессе. А если автор кого-то не убедил – читайте эпиграф снова.
Игорь Изыльметьев
И завязалась у них дискуссия...
Господи, не допусти! - Ответ на «сбытие мечт» Павла Черепанова
|
 Советы :: Фото/видео :: Поиск :: Профиль
Советы :: Фото/видео :: Поиск :: Профиль